Research in Neural Control and Robotics
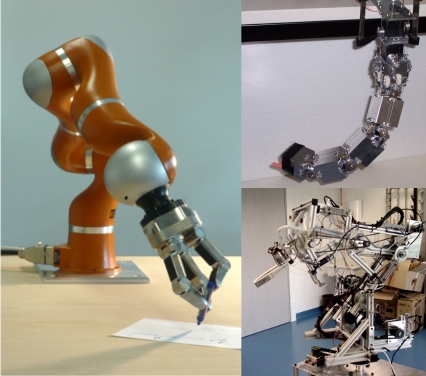
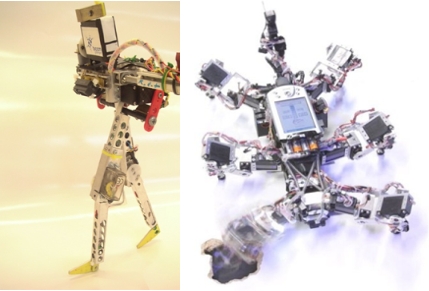
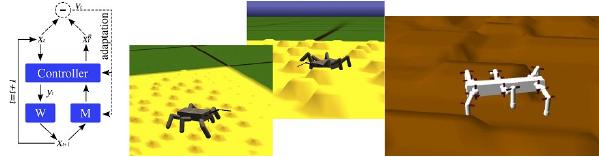
Sensory-motor control for complex movement generation is a challenging problem because one needs to combine information from multiple sensor modalities and provide -in real time- coordinated outputs to many motor units. Animals and humans have solved this combinatorial problem with which we are confronted in our daily life, e.g., during object manipulation requiring complex dynamic movement sequences or locomotion requiring complex repetitive movements. In addition to these, we can learn to adapt movements to solve specific tasks or during dealing with environmental changes. To tackle this challenging problem, this research area, Neural control and Robotics, deals with the development of adaptive neural mechanisms for manipulation and locomotion where we use different types of robotic systems, like robot hands and arms, an elephant trunk-inspired robot arm, the RunBot series of dynamic planar biped robots, and the AMOS series of insect-like robots, as our experimental platforms. By doing so, this research area tries to achieve flexible, transferable solutions and a better understanding of the general control and plasticity principles in neural motor function for complex movement generation.
Main points of research are: