Neural Computation
The subgroup of Neural Computation concentrates on questions concerning biological information processing and its technical application to robots. Especially the ability of biological systems like humans and animals to adapt themselves to their environment and to memorize it is in the focus of our scientific work. Thus, we analyze closed-loop (agent-environment) systems at different levels of abstraction by using methods coming from information theory, mathematics, and physics.
Abstract models of agents (animals, robots) and their environment as interacting stochastic processes create the possibility to use formal analytical methods. We apply such methods to the study of autonomy and embodiment. On the one hand to sensibly differentiate agents and environment, on the other to clarify the relation of these notions to memory, adaptation and eventually cooperation.
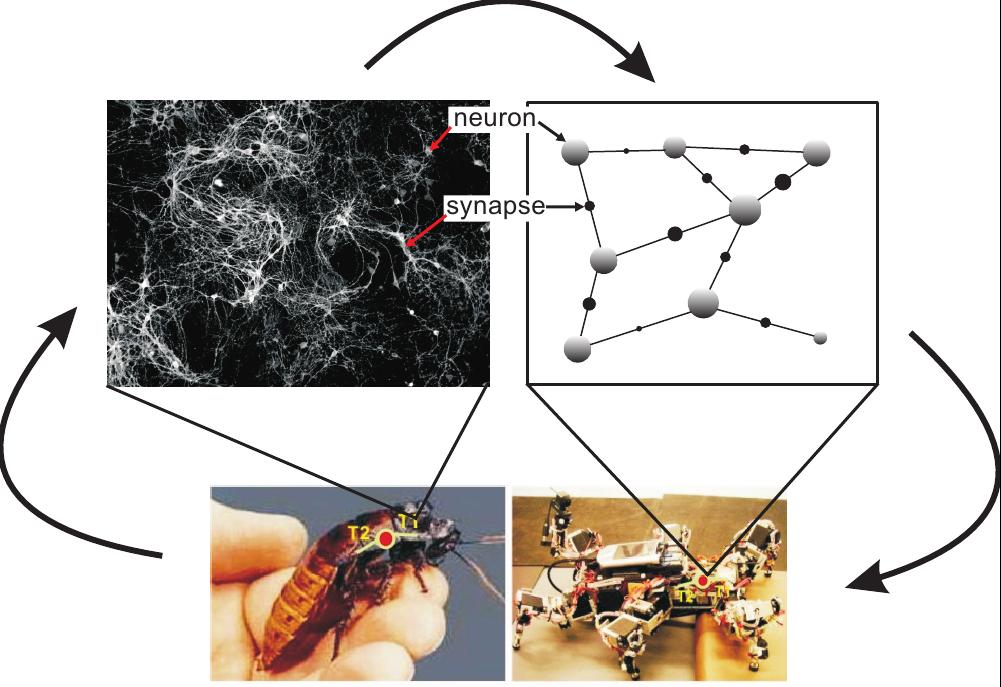
We also look at biological agents more specifically as they are prime examples of agent processes. For such agents, behavioural adaptation is mainly achieved via the plasticity of the nervous system (e.g. ongoing activity, synaptic weights) to environmental stimuli on different time scales. Therefore, we analyze different types of plasticity (STDP, Hebbian learning, Synaptic Scaling, Structural plasticity, etc.) and their effects on the dynamics and functional properties of neuronal networks.
With a solid foundation in closed-loop systems and neuronal dynamics we are implementing robotic systems exhibiting complex behaviour. In this case the neuronal network takes the role of the agent process in the loop.