Computer Vision Research
 Teaching entities to recognize, learn, and perform human manipulations is a significant problem in robotics. The Computer Vision Group is primarily interested in bridging the gap between sensory and semantic domains in order to let an agent monitor, learn, and then execute observed manipulation actions. Our goal is to achieve understanding of relations between manipulated objects and actions without a priori object knowledge or models through semantic analysis of image sequences in real time. In order to achieve this goal, our group is developing a real-time modular system for robotic vision and control. The system uses a graphical user interface to allow on-the-fly end-to-end configuration of a vision pipeline.
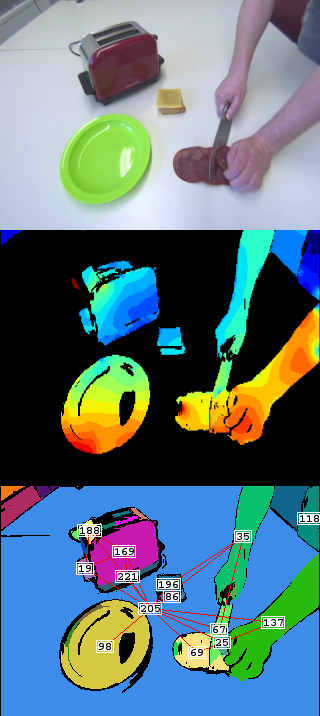
Users can quickly build a new vision pipeline using processing modules developed by our group. We are currently developing modules for stereo image acquisition and rectification, segmentation, dense disparity mapping, optical flow, segment relation graphing, and semantic event chain creation. Several of these modules also leverage the power of graphics processing units to significantly enhance processing speeds.
Teaching entities to recognize, learn, and perform human manipulations is a significant problem in robotics. The Computer Vision Group is primarily interested in bridging the gap between sensory and semantic domains in order to let an agent monitor, learn, and then execute observed manipulation actions. Our goal is to achieve understanding of relations between manipulated objects and actions without a priori object knowledge or models through semantic analysis of image sequences in real time. In order to achieve this goal, our group is developing a real-time modular system for robotic vision and control. The system uses a graphical user interface to allow on-the-fly end-to-end configuration of a vision pipeline.
Users can quickly build a new vision pipeline using processing modules developed by our group. We are currently developing modules for stereo image acquisition and rectification, segmentation, dense disparity mapping, optical flow, segment relation graphing, and semantic event chain creation. Several of these modules also leverage the power of graphics processing units to significantly enhance processing speeds.